Meet the Family -- About These Robots
These robots were built by Chuck McManis
who is the president of the Home Brew Robotics Club.
This club
meets monthly in Cupertino California at the Cupertino Public
Library (main branch) on the last wednesday of the month.
The ARBE1
 The ARBE1 is based on a mechanical based that was designed by Ray
Butts of Lake Oswego Oregon. It uses a 68HC11 in a Miniboard as
its brains, although Ray also sells a 68HC11 based controller
called the TCOMP. The only sensors this robot has are its two
bumpers.
The ARBE1 is based on a mechanical based that was designed by Ray
Butts of Lake Oswego Oregon. It uses a 68HC11 in a Miniboard as
its brains, although Ray also sells a 68HC11 based controller
called the TCOMP. The only sensors this robot has are its two
bumpers.
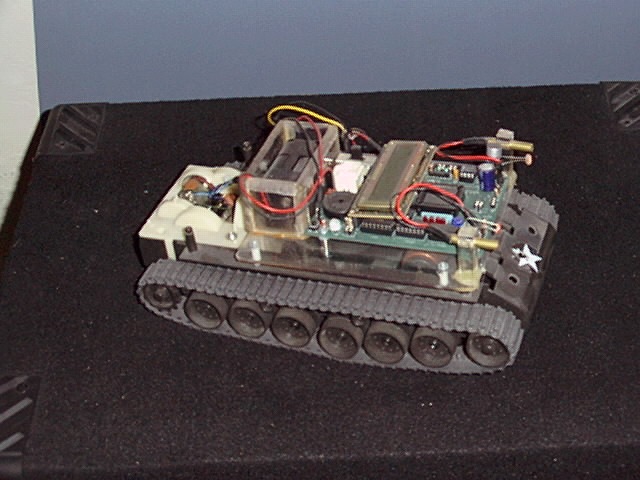
Sherman, the first "Robo-Tank"
 Sherman is a robot built on top of a
Radio Shack Sherman Tank radio controlled toy. This tank was sold
during the christmas season by Radio Shack in 1990. The brains
for Sherman is the "Rug Warrior" board as described in
the book "Mobile Robots: Inspiration to Implementation"
by Jones and Flynn. Sherman's sensors include a microphone, and
infrared detector, and an array of bumper switches. This robot
was featured on the show "The Know Zone"
Sherman is a robot built on top of a
Radio Shack Sherman Tank radio controlled toy. This tank was sold
during the christmas season by Radio Shack in 1990. The brains
for Sherman is the "Rug Warrior" board as described in
the book "Mobile Robots: Inspiration to Implementation"
by Jones and Flynn. Sherman's sensors include a microphone, and
infrared detector, and an array of bumper switches. This robot
was featured on the show "The Know Zone"
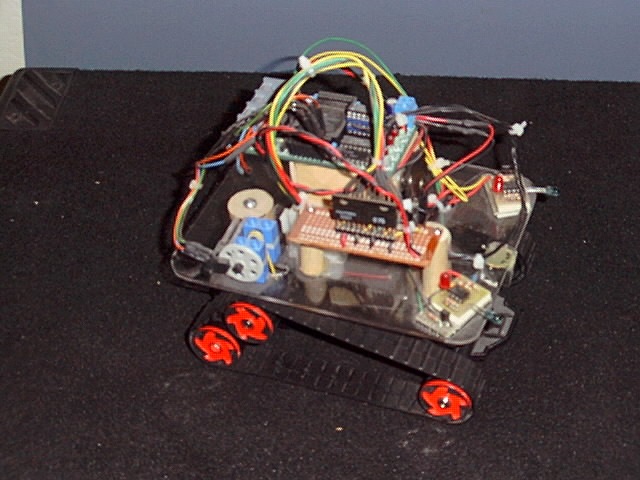
The Wild Cougar
 This is the "Wild Cougar." It became pretty famous when
I published a paper on the Internet about my experiences creating
it. The Cougar's main processor is a 68HC11 based Miniboard, but
it also sports a PIC based infra-red scanner/detector. Sensors on
the Cougar include wheel rotation sensors, Ultrasonic ranging
sensors, infrared proximity sensors, and battery voltage levels.
This robot was also featured in an article in Circuit Cellar Ink
titled "Turning Toys into Tools."
This is the "Wild Cougar." It became pretty famous when
I published a paper on the Internet about my experiences creating
it. The Cougar's main processor is a 68HC11 based Miniboard, but
it also sports a PIC based infra-red scanner/detector. Sensors on
the Cougar include wheel rotation sensors, Ultrasonic ranging
sensors, infrared proximity sensors, and battery voltage levels.
This robot was also featured in an article in Circuit Cellar Ink
titled "Turning Toys into Tools."
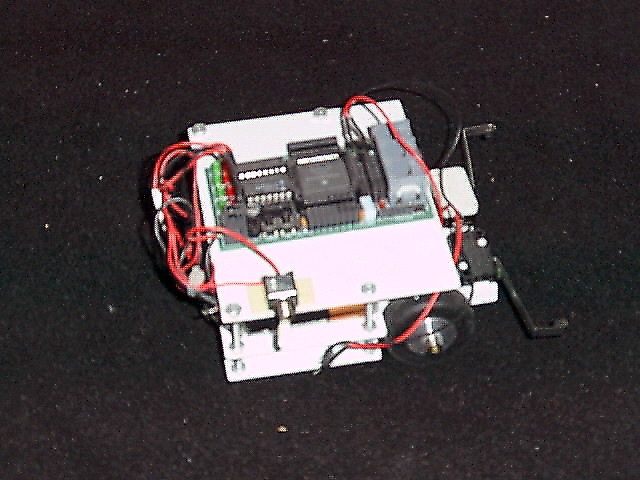
Dino, meal on wheels
 Dino is another robot built on top of a Radio Shack R/C chassis
called the DinoTrak. The purpose of this robot was originally to
be "prey" for the Wild Cougar. I built two Dinos, only
this one has survived, that were designed to run around while the
Cougar chased them. This exercise taught me just how hard it is
to track a moving target! The Dino has wheel speed sensors and an
IR proximity detector. It also sports a flashing IR beacon that
the Cougar can "see."
Dino is another robot built on top of a Radio Shack R/C chassis
called the DinoTrak. The purpose of this robot was originally to
be "prey" for the Wild Cougar. I built two Dinos, only
this one has survived, that were designed to run around while the
Cougar chased them. This exercise taught me just how hard it is
to track a moving target! The Dino has wheel speed sensors and an
IR proximity detector. It also sports a flashing IR beacon that
the Cougar can "see."
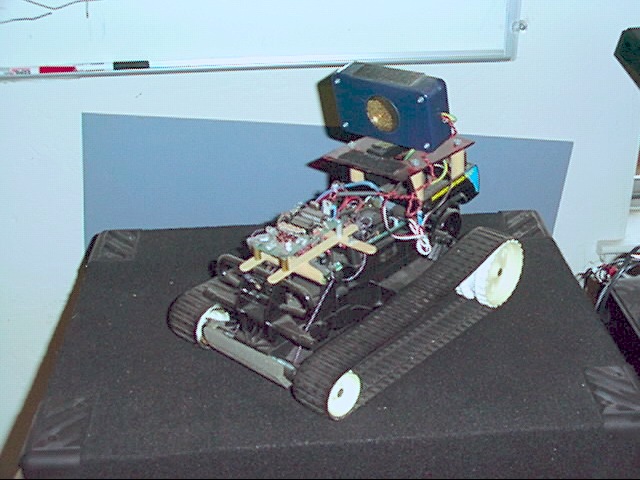
Robotank III, Lets get Physical
 This robot is my first
attempt to build a robot that can manipulate its environment in a
meaningful way. It has a Lynx Motion arm that is capable of
picking up small objects and a video camera for vision. The base
brain is a Handyboard, however it also supports an RF link back
to a PC where higher level decisions can be made.
This robot is my first
attempt to build a robot that can manipulate its environment in a
meaningful way. It has a Lynx Motion arm that is capable of
picking up small objects and a video camera for vision. The base
brain is a Handyboard, however it also supports an RF link back
to a PC where higher level decisions can be made.
The base for this robot started life as an M1A1 Abrahms Tank
model that came from Chicago Models International
the last contact information I have for CMI is:
Chicago Model International
611 Rockland Rd Suite #1
Lake Bluff, IL 60044
Ph: (708) 735-8500
Fx: (708) 735-8516
 The ARBE1 is based on a mechanical based that was designed by Ray
Butts of Lake Oswego Oregon. It uses a 68HC11 in a Miniboard as
its brains, although Ray also sells a 68HC11 based controller
called the TCOMP. The only sensors this robot has are its two
bumpers.
The ARBE1 is based on a mechanical based that was designed by Ray
Butts of Lake Oswego Oregon. It uses a 68HC11 in a Miniboard as
its brains, although Ray also sells a 68HC11 based controller
called the TCOMP. The only sensors this robot has are its two
bumpers.